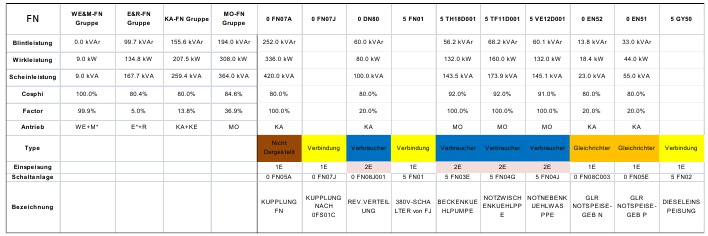
Besoin :
Le système étudié est composé de tiges verticales dont l’extrémité basse est plongée dans un liquide sous pression. Le déplacement vertical de ces tiges s’effectue grâce à des grappins que l’on actionne par l’intermédiaire de bobines d’induction alimentées par des convertisseurs de façon séquentielle.
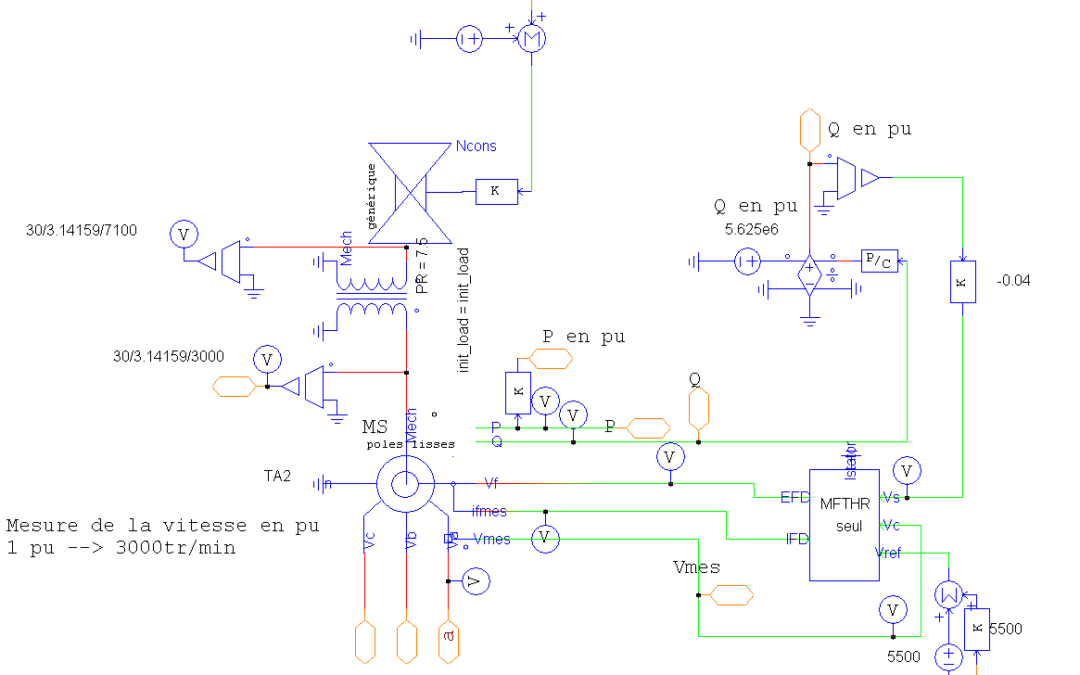
Afin d’identifier les risques de défaillances de ce système dans le cadre de modification de son contrôle commande, il est nécessaire d’évaluer l’influence des différents paramètres sur la commande du déplacement de ces tiges. Pour cela, un modèle a été réalisé sous le logiciel PSIM.
Réalisation :
Outre la modélisation des différents phénomènes opérant au sein du système : poussée du fluide sur les tiges, force élastique du ressort des grappins, force magnétique des bobines sur les grappins…, Capsim s’est servi de courbes d’essai pour déterminer les différents paramètres entrant en jeu : raideur des ressorts, inductance des bobines, paramètres du régulateur…
Capsim a par ailleurs défini une stratégie de validation de la réalisation des manœuvres des tiges par mesure des courants d’alimentation du système en salle électrique, la mesure ou la visualisation directe de position des tiges étant impossible.
Bilan :
Ce simulateur a alors permis d’obtenir les évolutions temporelles de la position verticale des tiges selon plusieurs scénarios possibles, et suivant plusieurs jeux de conditions extérieures. Une optimisation des séquences de montée ou de descente des tiges afin de les fiabiliser a pu être proposée.